ADTF
——专为开发高级驾驶辅助系统(ADAS)和自动驾驶系统的全面软件框架。
功能介绍
全面解决方案
ADTF为ADAS和自动驾驶系统提供了一个全面的开发解决方案,包括快速原型设计、仿真、数据记录和验证等关键功能。
模块化架构
ADTF采用模块化架构,使开发人员能够轻松地集成和重用软件组件,同时支持即插即用的软件,使其适用于各种硬件配置。
数据记录和回放
ADTF可以记录各种数据流,包括传感器数据和通信数据,以便后续的数据分析和回放,有助于系统验证和改进
环境感知和车辆状态估计
ADTF具备处理各种传感器数据的能力,实现精确的环境感知和车辆状态估计,是开发ADAS功能的重要工具
实时监测和分析
ADTF提供强大的实时监测、分析和记录功能,帮助开发人员评估系统性能并进行算法调试,确保系统的可靠性和稳定性
快速原型制作
ADTF使开发人员能够快速原型设计和测试ADAS功能,加速开发周期,从概念到实际应用的迭代更加高效
标准化支持
ADTF支持多种汽车标准,如CAN、CAN FD、FlexRay、XCP、Some/IP、汽车以太网/AUTOSAR等,确保与汽车电子系统的互操作
可扩展性
ADTF具有高度的可扩展性,开发人员可以根据特定需求添加新的功能模块和算法,使其适应不断变化的开发要求
多平台支持
ADTF可在不同的平台上运行,包括x64和ARM64,并支持多个操作系统,如Linux和Windows,使其更具灵活性。
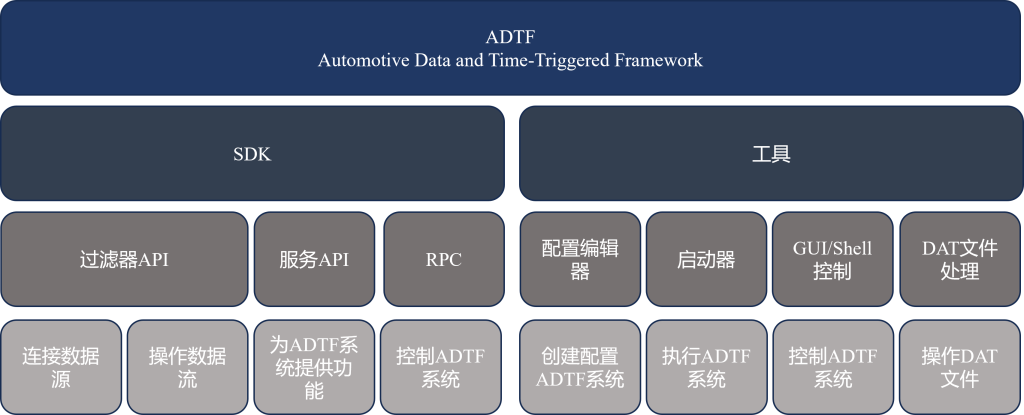
ADTF架构
推荐软件版本 ≥ ADTF3.14.0
ADTF软件功能
- 使用的工具和 adtfplugins 的组合(无头,UI)
- 直播、回放(实时或更快)或录制模式(流数量、多个录制器等)
- 独立使用 ADTF Launcher,
- 与第三方工具或多个实例/分布式设置一起使用
- 裸机、桌面、docker、云或虚拟映像
- adtfgraph 中组件的组合、求和和嵌套
- 加载的元 (xml) 文件中数据结构的计数和嵌套
- 处理样本的数据大小、数量和速率
- 请求处理和解码的子流数量
- 单线程或多线程播放
- CPU/核心/线程关联依赖库
- 设备的延迟、可用队列和缓冲区
- 读写 I/O 流量
- 用于 UI 算法和操作的 GPU
硬件要求
- 支持要安装的所需软件依赖项的硬件设置
- 至少一个单核处理器或 1GHz 的 SoC
- 至少 2GB RAM 用于基本使用工具和基本非嵌套图形,其中包含基本交付中的标准组件
显示
• 使用全高清(推荐分辨率)的显示器
支持平台(推荐)
• 支持平台:支持Windows 64 Bit platform
(e.g.Windows 7or11)
• 要求:运行时——
1、Visual C++ 2019 Redistributable
2、Visual C++ 2019 / Visual C++ 14.2 (for
debug libraries and executables)
开发时——
1、Visual C++ 2019 (at least CXX Compiler
MSVC 19.29) / Visual C++ 14.2 (VC142
Toolchain at least 14.29)
2、MSBuild Version 16.x (at least 16.11)
3、MSBuild Tools only or full Visual Studio
IDE installation which covers this
requirements
4、Windows Kit 10 (at least 10.0.19041.0)
5、CMake ≥ 3.23.2
• ADTF delivery package的可用磁盘空
间:4GB
• 支持平台:支持其他发行版(例如
Fedora,Debian)
• 要求: 1、gcc ≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0 libxcb-xinerama0
xterm
• ADTF delivery package的可用磁盘空
间:6GB
• 支持平台:支持其他发行版(例如
Fedora,Debian)
参考硬件是nVidia Jetson TX2
板(兼容例如nVidia Drive PX 2
或 Jetson AGX XAVIER)
• 要求:1、gcc≥ 7
2、libc ≥ 2.27
3、libstdc++ ≥ 6.0.25
4、CMake ≥ 3.23.2
5、build-essential libarchive-dev
mesa-common-dev mesa-utils
libglib2.0-0
• ADTF delivery package的可用磁盘空
间:4GB
系统开发应用
快速模型设计
ADTF可开发一个用于可视化传感器和相机数据的系统。该系统通过ADTF的功能连接和可视化相机数据、信号和调试信息。开发人员可以使用该系统验证ADAS/AD功能的开发。
例如,使用ADTF提供的2D和3D可视化功能来查看车道检测算法或乘客识别功能的可靠性。
数据记录
支持原始设备制造商(OEM)的测量技术开发利用ADTF作为中心单元,集成和扩展工具方便访问、解码、处理和可视化传感器数据、总线数据和调试接口记录原始数据流,用于后续离线分析和实验重现。
模拟
ADTF软件支持AUTOSAR软件组件的集成和测试。开发了AUTOSAR辅助工具,利用其为测试AUTOSAR软件组件提供解决方案。可以直接通过ADTF访问和测试这些组件,而无需进行复杂的残留总线模拟。
后处理
可实现高度可扩展的数据验证通过。框架链接不同的工具或搭建数据流进行数据分析和验证。提供丰富的应用程序、服务和接口适应各种不同的数据处理需求,并在车载资源上高效运行。

{kind=link}